Der Raspberry Bootloader wurde vor dem erst Start via SD Karte nach Anleitung der Offiziellen Raspberry Webseite neu aufgesetzt um das direkte booten von der SSD Festplatte zu ermöglichen.
Für den Start reicht es das Netzkabel in die Steckdose reinzustecken. Ist das Betriebssystem einmal hochgefahren wird der PC bequem über den Taster aus und wieder eingeschaltet, soviel zur Theorie.
Alles ist bereit und die Spannung steigt, Stecker in die Steckdose, die rote LED leuchtet auf die grüne LED blinkt, die Himbeeren erscheinen auf dem Bildschirm, Textzeilen leuchten auf. Plötzlich ist der Bildschirm in schwarz gehüllt und nur noch der Cursor blinkt. Sekunden vergehen es passiert nichts. Nach einer Minute endlich ein Lebenszeichen, eine Textzeile erscheint. Nach weiteren Minuten erscheinen Fehlermeldungen auf dem Display, vorwiegend I/O Fehler der Festplatte.
Ratlosigkeit macht sich breit und 1000 Fragen schwirren durch den Kopf, Raspi defekt, Bootloader nicht kompatibel, SSD Adapter kaputt ……… ?! Die Stimmung ist am Boden, was nun ?
Ich habe nochmal alle Anschlüsse geprüft , Festplatte neu formatiert, Bootloader und Betriebsyste neu installiert, das hat alles nichts gebracht und alles war für die Katz, dachte ich.
Nach langer Suche im Interner fand ich den folgenden Artikel:
STICKY: If you have a Raspberry Pi 4 and are getting bad speeds transferring data to/from USB3.0 SSDs, read this.
Wie im untenstehenden Artikel beschrieben habe ich die config Datei cmdline.txt im Verzeichnis /boot angepasst. Folgender Befehl, gültig für den SSD-Adapter von LogiLink , habe ich hinzugefügt: usb-storage.quirks=152d:0578:u
Gespannt bootete ich das System neu, und schon nach wenigen Sekunden war der Bootvorgang abgeschlossen . Die Erleichterung war riesengross als die Desktopoberfläche auf dem Bildschirm angezeigt wurde.
So das Projekt ist erfolgreich beendet und kann ad acta gelegt werden.
Hier den ganzen Artikel, gefunden auf der Seite von Raspberry Rubrik Troubelshooting:
STICKY: If you have a Raspberry Pi 4 and are getting bad speeds transferring data to/from USB3.0 SSDs, read this:
Continue reading “Raspberry 4 Gehäuse (Erste in Betriebnahme)”












 Anschlusskabel aufgelötet. Der Ventilator ist nun leise und erträglich. Die Temperatur liegt nun bei 45 Grad Celsius was nach meiner Meinung Akzeptabel ist.
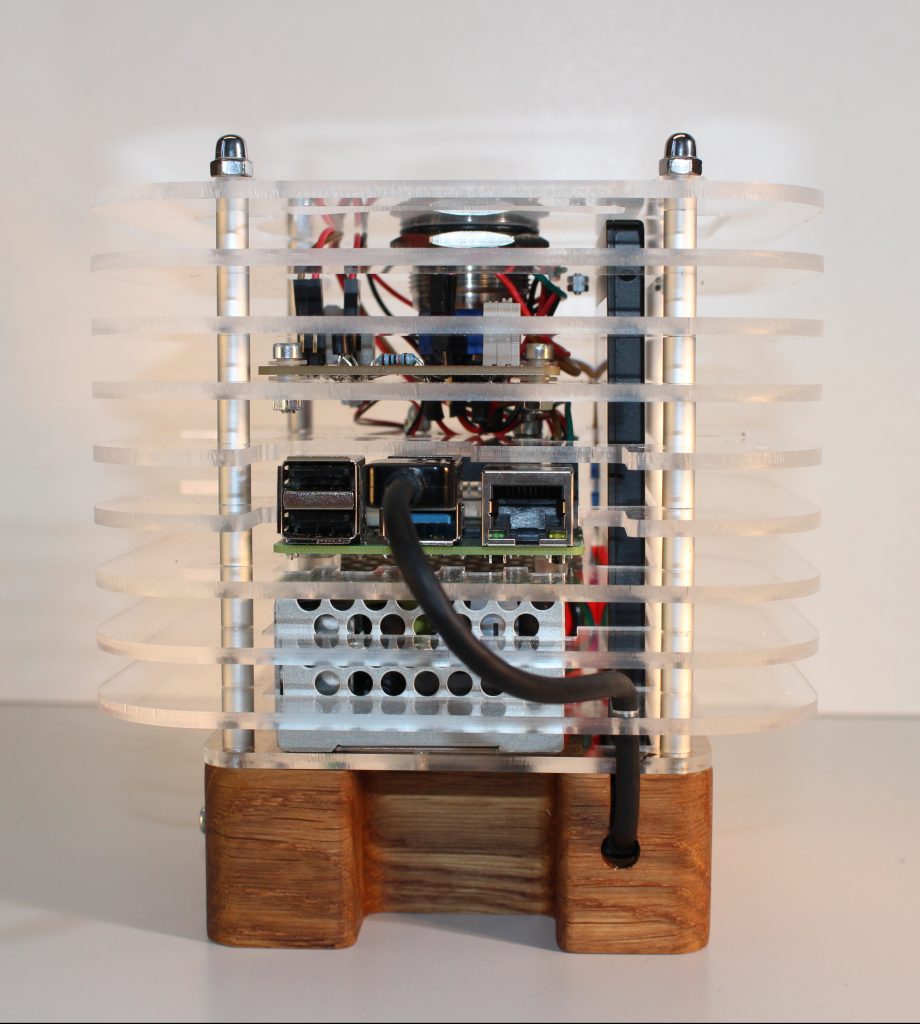
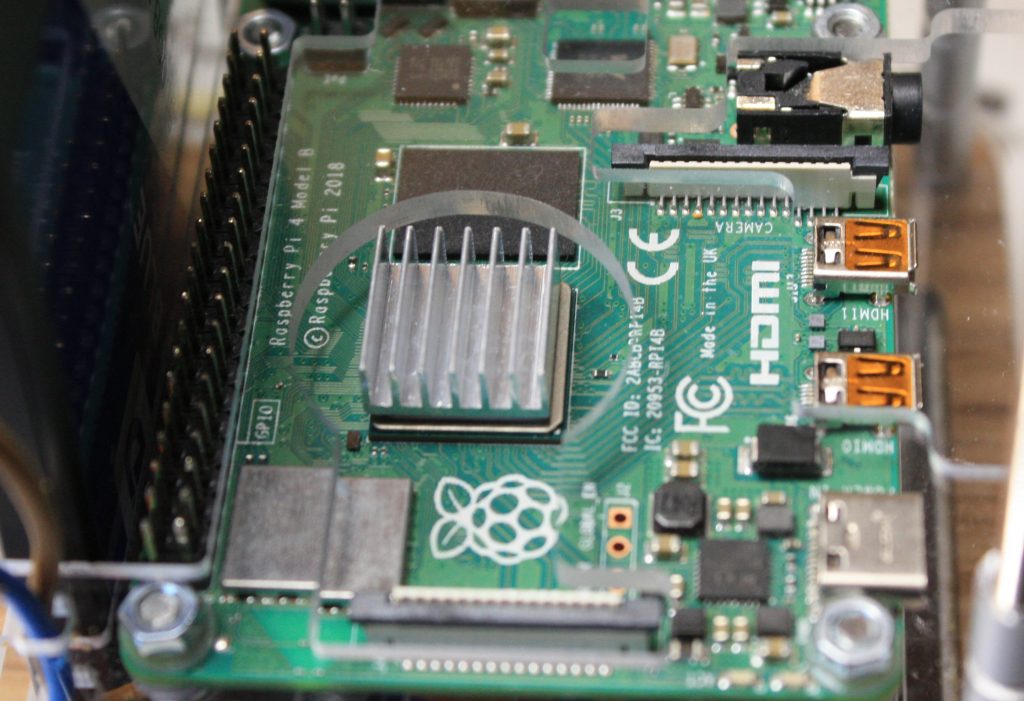
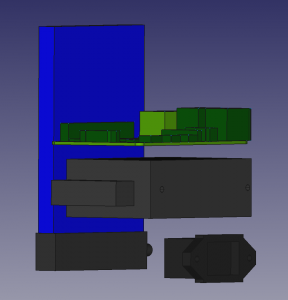
Anschlusskabel aufgelötet. Der Ventilator ist nun leise und erträglich. Die Temperatur liegt nun bei 45 Grad Celsius was nach meiner Meinung Akzeptabel ist.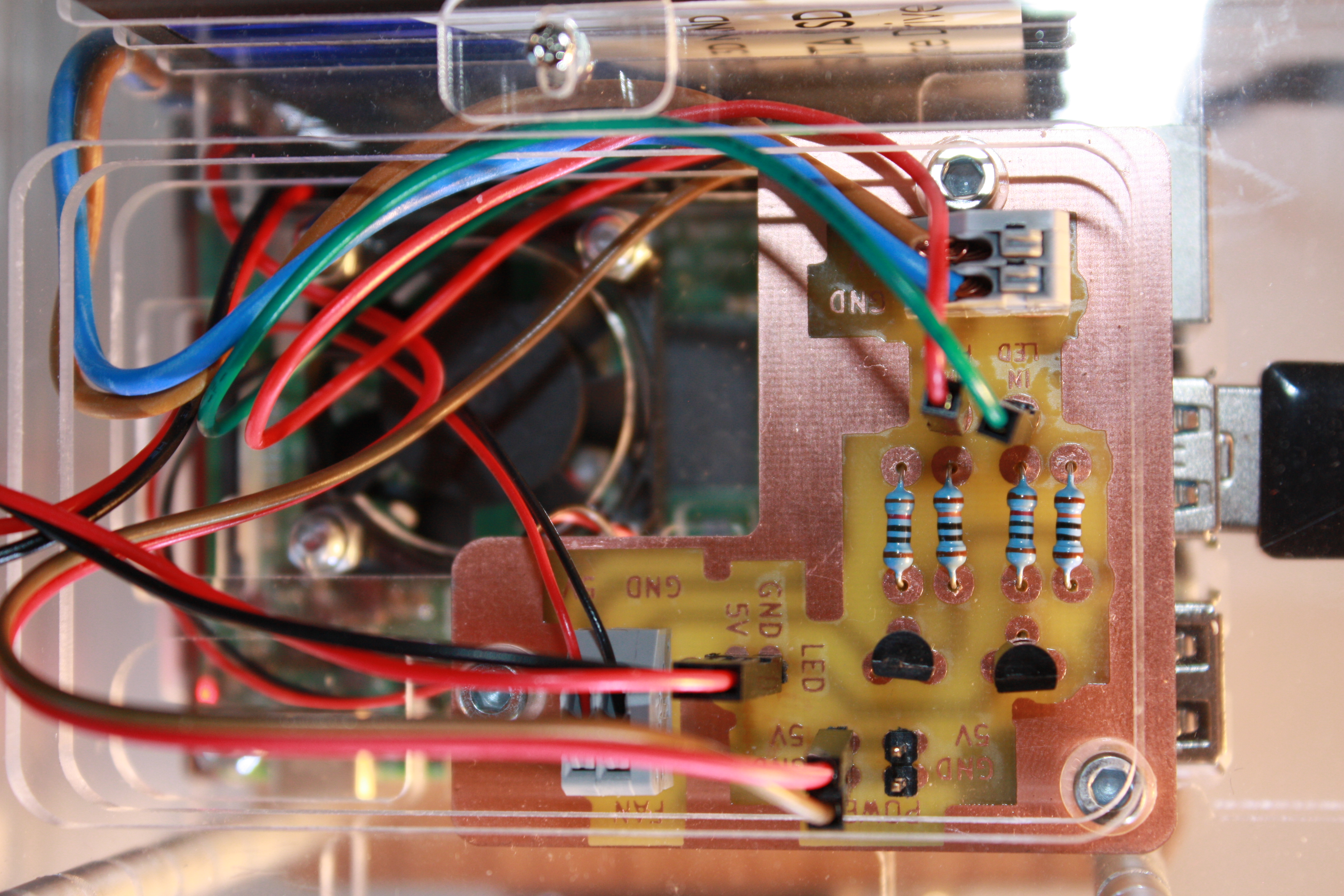 Die Steuerplatine erhält den Strom direkt vom Netzteil und versorgt die Übrigen Verbraucher. Auch das Raspberry bezieht den Strom von der Steuerplatine und nicht von der USB-C Buchse. Der Strom wird über den Pin 04 (5 Volt) und Pin 39 (Ground) in das Raspi eingespeist.
Die Steuerplatine erhält den Strom direkt vom Netzteil und versorgt die Übrigen Verbraucher. Auch das Raspberry bezieht den Strom von der Steuerplatine und nicht von der USB-C Buchse. Der Strom wird über den Pin 04 (5 Volt) und Pin 39 (Ground) in das Raspi eingespeist.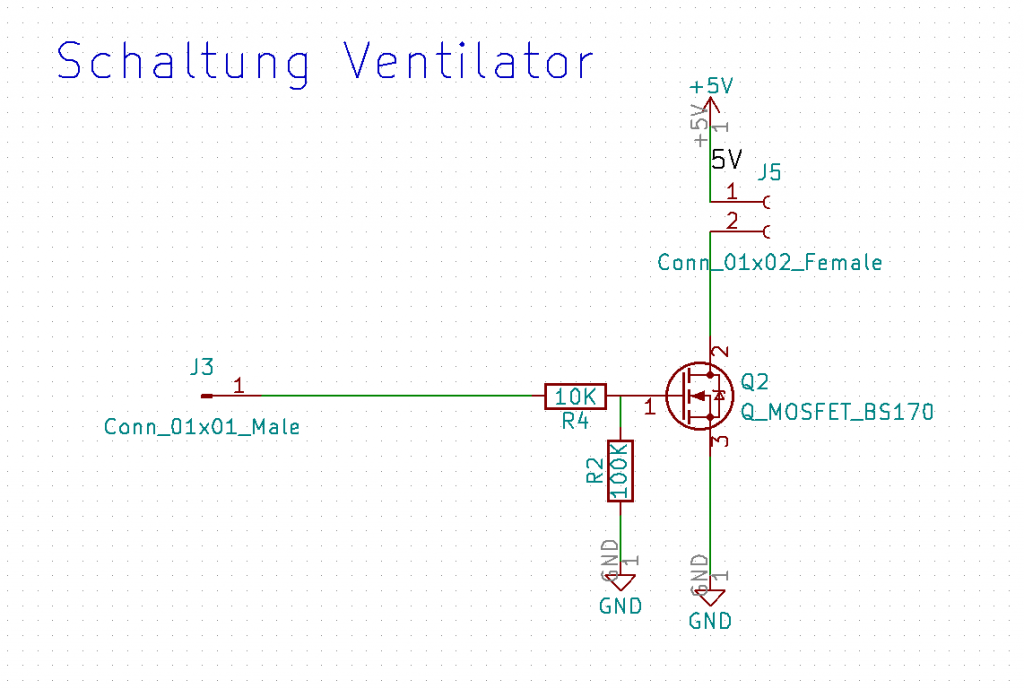
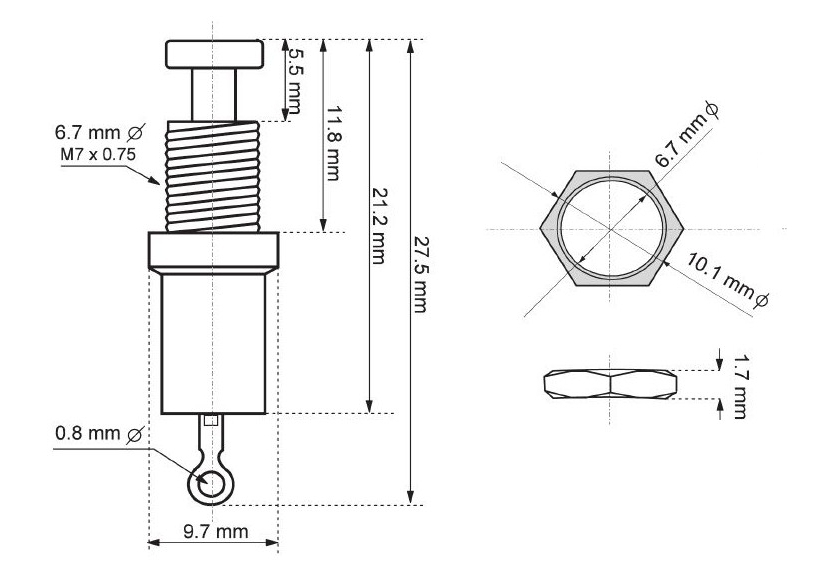
 Der Taster wird direkt an den Pin 05 (GPIO 03) und Pin 06 (Ground) angeschlossen.
Der Taster wird direkt an den Pin 05 (GPIO 03) und Pin 06 (Ground) angeschlossen.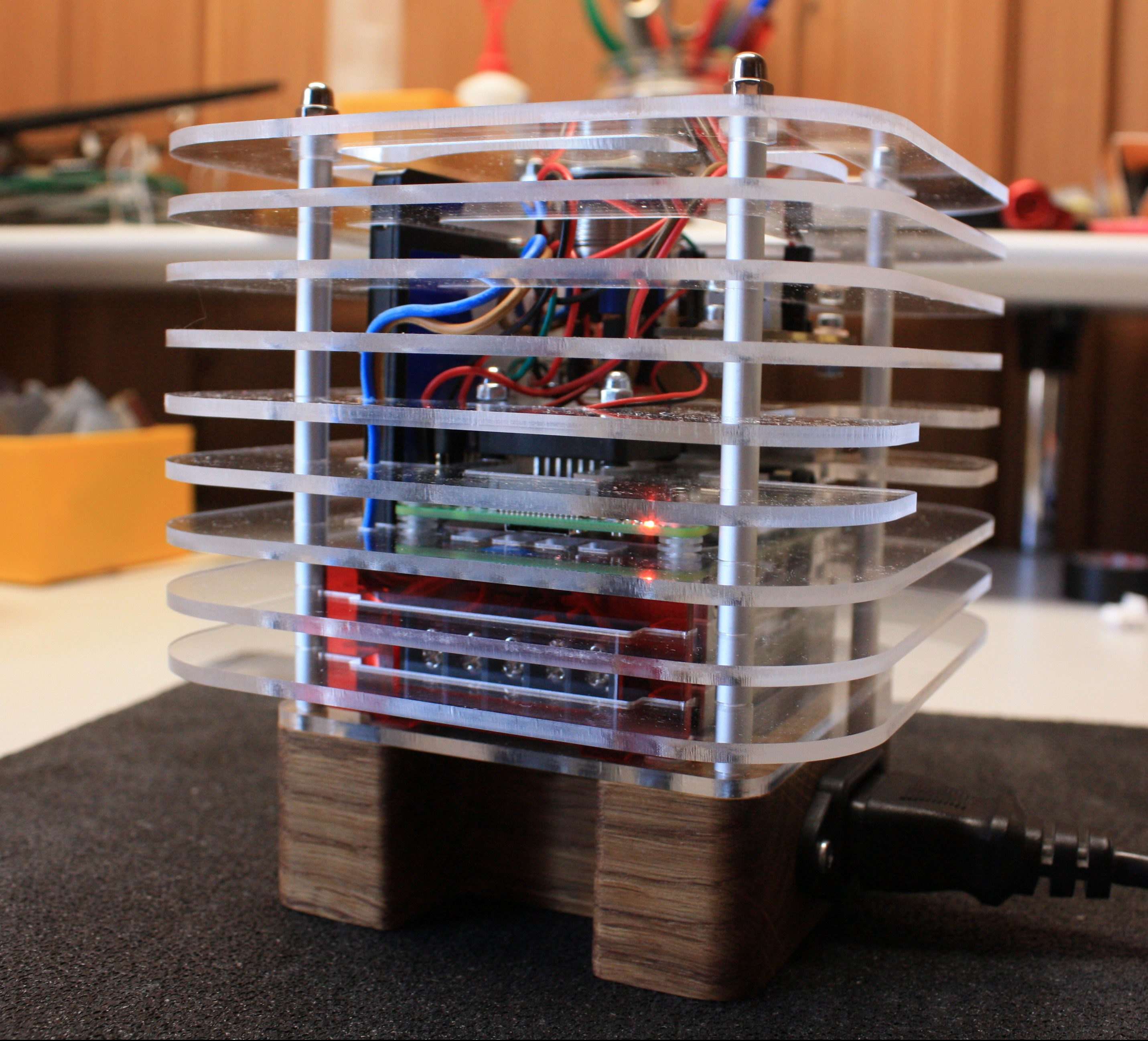

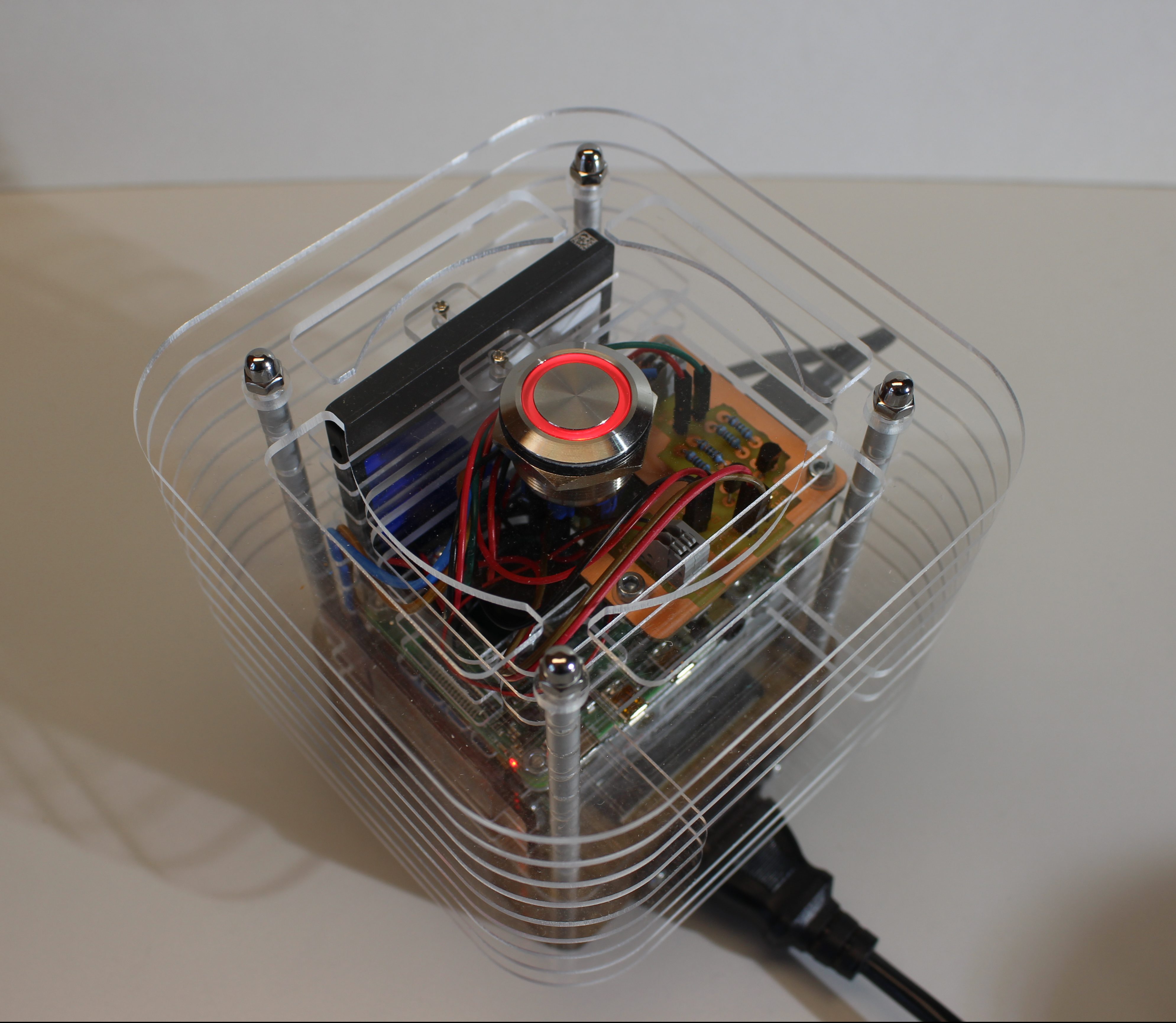
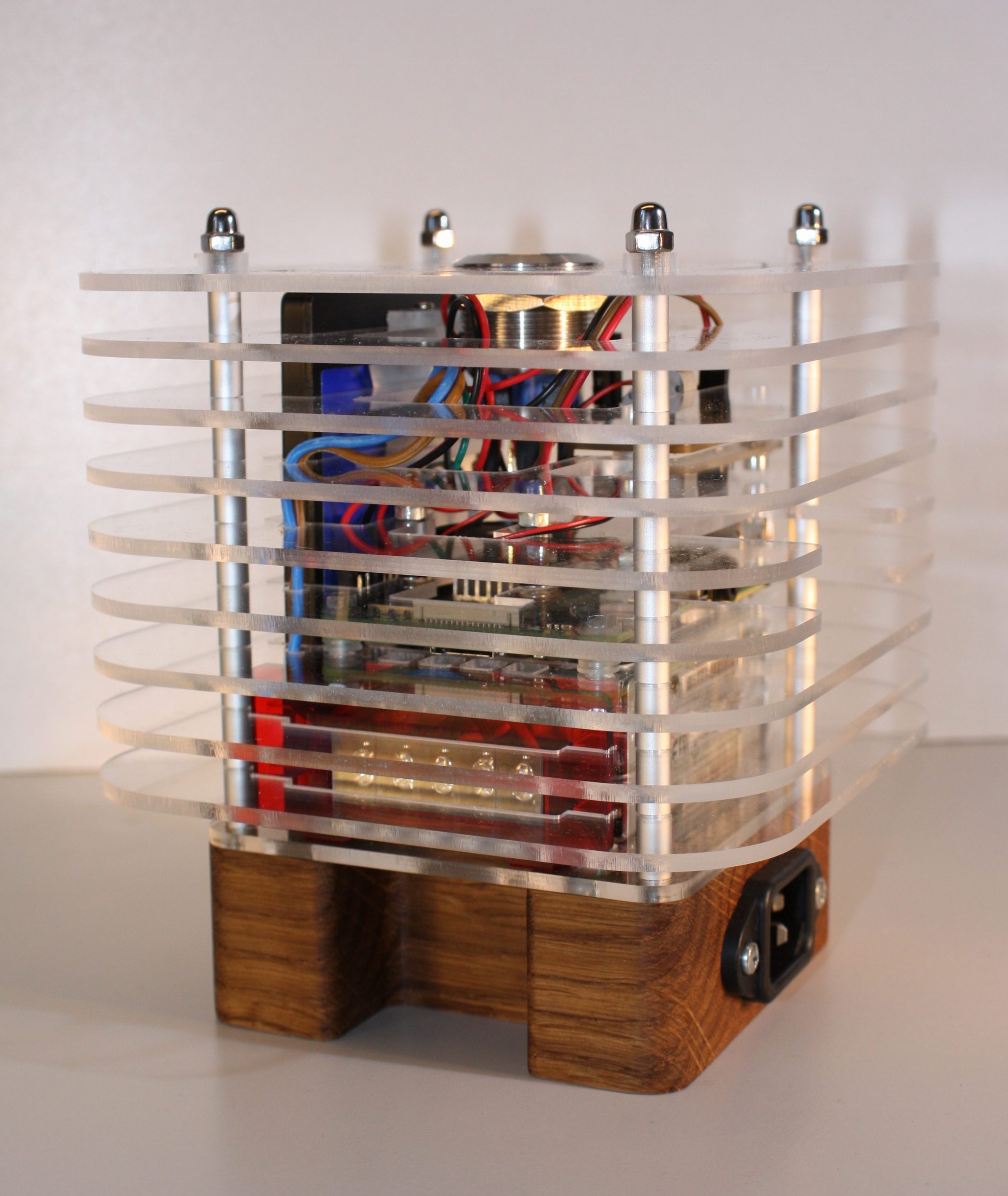
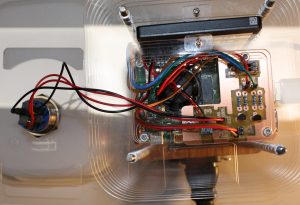
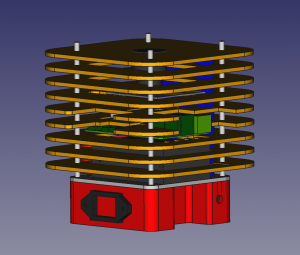
 Der Mini PC hat einen 220 Volt Anschluss auf der Rückseite des Sockels. Auch der SSD Controller wurde in den Sockel integriert und somit wird die Festplatte vertikal von oben herab angeschlossen.
Der Mini PC hat einen 220 Volt Anschluss auf der Rückseite des Sockels. Auch der SSD Controller wurde in den Sockel integriert und somit wird die Festplatte vertikal von oben herab angeschlossen.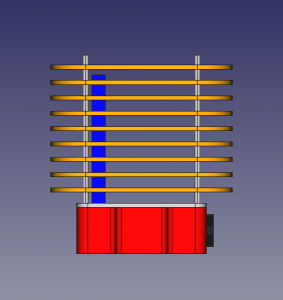 Um die typische Zylinder Form an zu deuten werden Zierrippen aus Plexiglas verwendet. Die Plexiglas dicke beträgt 3 mm und der Abstand zwischen den Elementen 8 mm, optimal um das Raspberry 4 und die dazugehörenden Teile darin zu versorgen.
Um die typische Zylinder Form an zu deuten werden Zierrippen aus Plexiglas verwendet. Die Plexiglas dicke beträgt 3 mm und der Abstand zwischen den Elementen 8 mm, optimal um das Raspberry 4 und die dazugehörenden Teile darin zu versorgen.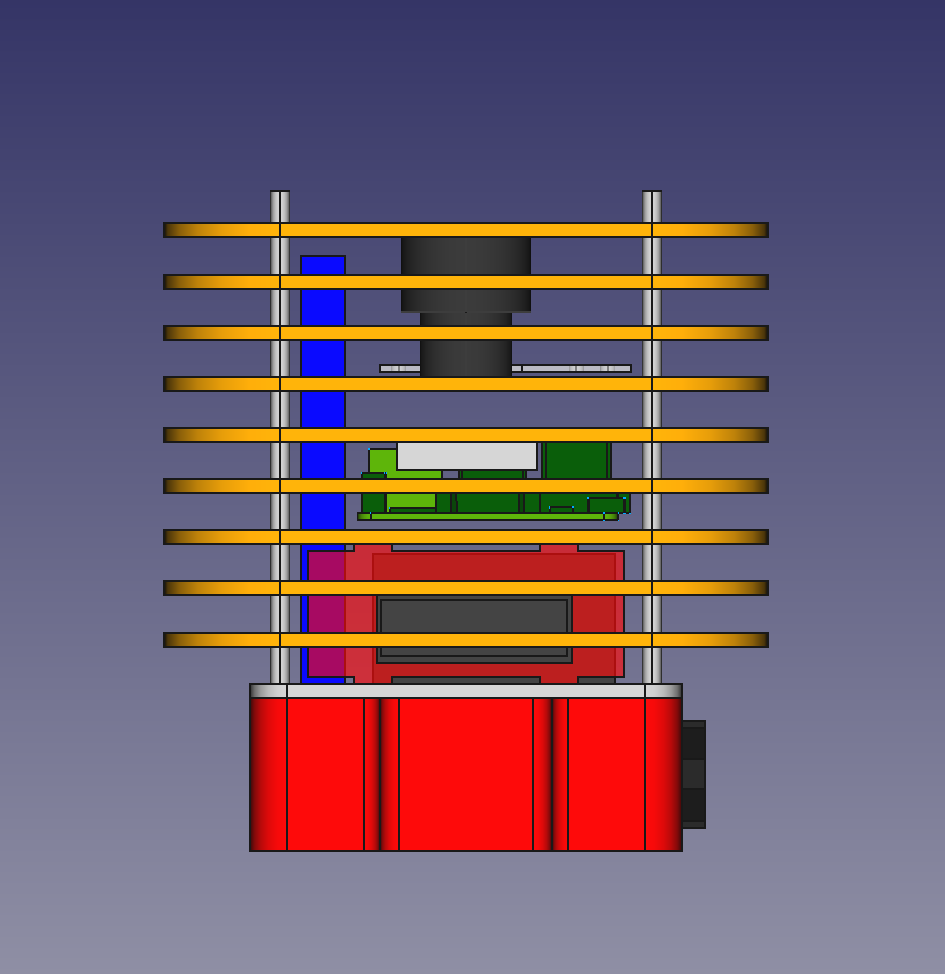
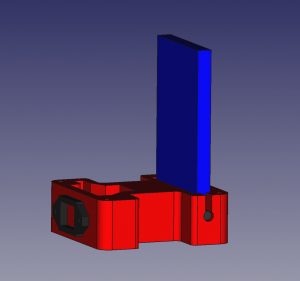
 Das 3D Modell ist nun soweit ausgearbeitet dass ich die dafür angefertigten Skizzen in die Maschinensprache G-Code übersetzen lassen kann, die Sprache die die CNC – Fräsmaschine auch versteht und etwas damit anfängt.
Das 3D Modell ist nun soweit ausgearbeitet dass ich die dafür angefertigten Skizzen in die Maschinensprache G-Code übersetzen lassen kann, die Sprache die die CNC – Fräsmaschine auch versteht und etwas damit anfängt.
 So es beginnt der Aufwendige Teil der Arbeit, es werden die Masse der Bauteile genommen und damit das Programm gefüttert, es entsteht nach und nach ein 3D Modell.
So es beginnt der Aufwendige Teil der Arbeit, es werden die Masse der Bauteile genommen und damit das Programm gefüttert, es entsteht nach und nach ein 3D Modell.
